|
Malika Meghjani
|

|
Home |
Publications |
Presentations |
Projects |
Teaching Assistant |
Activities |
Updates
Research Projects
 We consider the problem of exploring an unknown
environment with a pair of mobile robots. The goal is to make
the robots meet (or rendezvous) in minimum time such that
there is a maximum speed gain of the exploration task. The
key challenge in achieving this goal is to rendezvous with
the least possible dependency on communication. This single
constraint involves several sub-problems: finding unique potential
rendezvous locations in the environment, ranking these locations
based on their uniqueness and synchronizing with the other robot
to meet at one of the locations at a scheduled time. In addition,
these tasks are to be performed simultaneously while exploring
and mapping the environment. We propose an approach for
efficiently combining the exploration and rendezvous tasks by
considering the cost of reaching a rendezvous location and
the reward of its uniqueness. This cost and reward model is
combined with a set of deterministic and probabilistic rendezvous
strategies for the robots to meet during exploration.
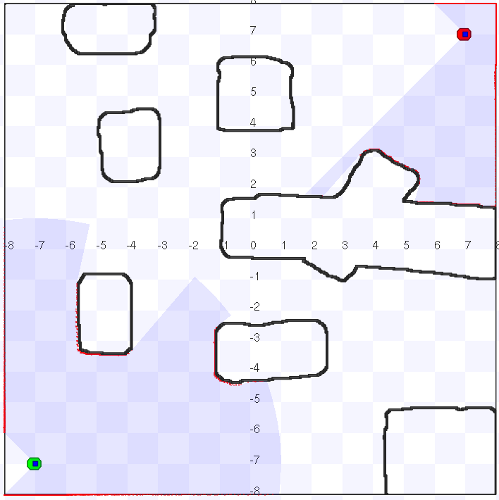
We consider the problem of exploring an unknown
environment with a pair of mobile robots. The goal is to make
the robots meet (or rendezvous) in minimum time such that
there is a maximum speed gain of the exploration task. The
key challenge in achieving this goal is to rendezvous with
the least possible dependency on communication. This single
constraint involves several sub-problems: finding unique potential
rendezvous locations in the environment, ranking these locations
based on their uniqueness and synchronizing with the other robot
to meet at one of the locations at a scheduled time. In addition,
these tasks are to be performed simultaneously while exploring
and mapping the environment. We propose an approach for
efficiently combining the exploration and rendezvous tasks by
considering the cost of reaching a rendezvous location and
the reward of its uniqueness. This cost and reward model is
combined with a set of deterministic and probabilistic rendezvous
strategies for the robots to meet during exploration.
 We address the problem of rendezvous between
two agents in urban street networks. Specifically, we consider
the case where the agents have variable speeds and they need to
schedule a rendezvous under uncertainty in their
travel times. Examples of such a scenario range from everyday
life where two people would like to coordinate a meeting while
going from office to home; to a futuristic case where automated
taxis would like to meet each other for load balancing
passengers. The scheduling for such scenarios can easily become
challenging with uncertainties such as delayed departures, road
blocks due to construction or traffic congestion. Any solution
for such a task is required to minimize the waiting time and
the planning overhead. We propose an algorithm
that optimizes the total travel time and the waiting time for
two agents to complete their respective paths from start to
rendezvous and from rendezvous to goal locations subject to
delays along their paths. We validate our approach with a street
network database which has a cost associated with every query
made to the database server. Thus our algorithm intelligently
optimizes for rendezvous trajectories that effectively mitigate
the scourge of traffic delays, while simultaneously limiting the
number of queries through careful analysis of the informative
value of each potential query.
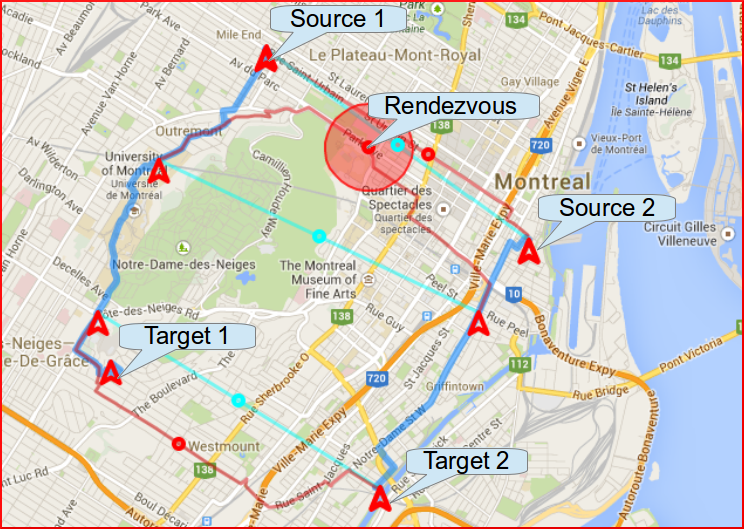
We address the problem of rendezvous between
two agents in urban street networks. Specifically, we consider
the case where the agents have variable speeds and they need to
schedule a rendezvous under uncertainty in their
travel times. Examples of such a scenario range from everyday
life where two people would like to coordinate a meeting while
going from office to home; to a futuristic case where automated
taxis would like to meet each other for load balancing
passengers. The scheduling for such scenarios can easily become
challenging with uncertainties such as delayed departures, road
blocks due to construction or traffic congestion. Any solution
for such a task is required to minimize the waiting time and
the planning overhead. We propose an algorithm
that optimizes the total travel time and the waiting time for
two agents to complete their respective paths from start to
rendezvous and from rendezvous to goal locations subject to
delays along their paths. We validate our approach with a street
network database which has a cost associated with every query
made to the database server. Thus our algorithm intelligently
optimizes for rendezvous trajectories that effectively mitigate
the scourge of traffic delays, while simultaneously limiting the
number of queries through careful analysis of the informative
value of each potential query.
 This project addresses the problem of searching
multiple non-adversarial targets using a mobile searcher in
an obstacle-free environment. In practice, we are particularly
interested in marine applications where the targets drift on
the ocean surface. These targets can be surface sensors used
for marine environmental monitoring, drifting debris, or lost
divers in open water. Searching for a floating target requires
prior knowledge about the search region and an estimate
of the target’s motion. This task becomes challenging when
searching for multiple targets where persistent searching for
one of the targets can result in the loss of other targets.
Hence, the searcher needs to trade-off between guaranteed
and fast searches. We propose three classes of search strategies
for addressing the multi-target search problem. These include,
data-independent, probabilistic and hybrid search. The data-independent
search strategy follow a pre-defined search pattern
and schedule. The probabilistic search strategy is guided by
the estimated probability distribution of the search target.
The hybrid strategy combines data-independent search patterns
with a probabilistic search schedule. We evaluate these search
strategies in simulation and compare their performance characteristics
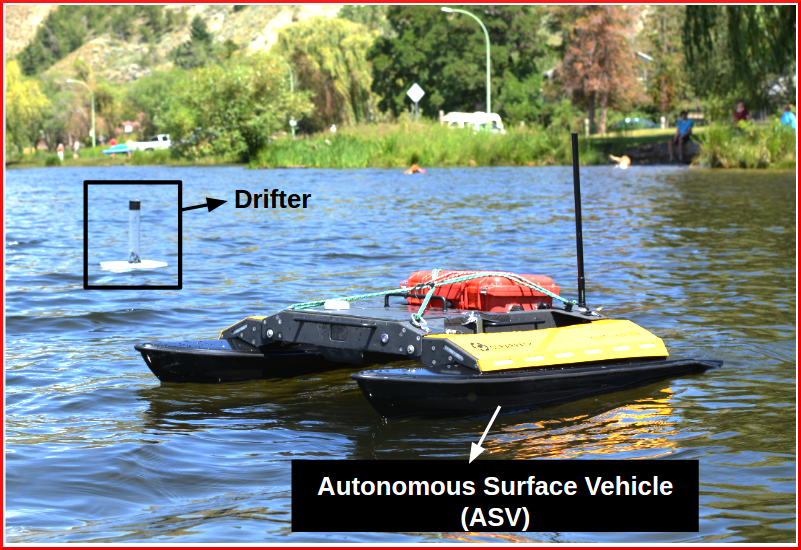
in the context of searching multiple drifting targets
using an Autonomous Surface Vehicle (ASV) and an Autonomous Underwater Vehicle.
This project addresses the problem of searching
multiple non-adversarial targets using a mobile searcher in
an obstacle-free environment. In practice, we are particularly
interested in marine applications where the targets drift on
the ocean surface. These targets can be surface sensors used
for marine environmental monitoring, drifting debris, or lost
divers in open water. Searching for a floating target requires
prior knowledge about the search region and an estimate
of the target’s motion. This task becomes challenging when
searching for multiple targets where persistent searching for
one of the targets can result in the loss of other targets.
Hence, the searcher needs to trade-off between guaranteed
and fast searches. We propose three classes of search strategies
for addressing the multi-target search problem. These include,
data-independent, probabilistic and hybrid search. The data-independent
search strategy follow a pre-defined search pattern
and schedule. The probabilistic search strategy is guided by
the estimated probability distribution of the search target.
The hybrid strategy combines data-independent search patterns
with a probabilistic search schedule. We evaluate these search
strategies in simulation and compare their performance characteristics
in the context of searching multiple drifting targets
using an Autonomous Surface Vehicle (ASV) and an Autonomous Underwater Vehicle.
Research Tools
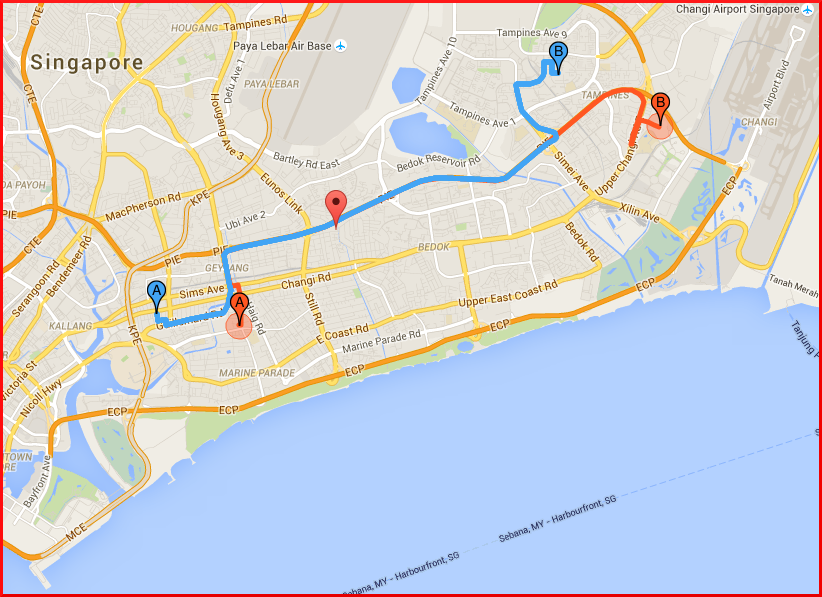 A cross-platform smart phone application was developed to provide optimal meeting points for humans and/or robot teams. Some of the various use cases for finding optimal meeting points are: social rendezvous, ride-sharing, package delivery and logistic management. Recently, it has also found a useful application in multi-modal fleet management system where the passengers need to be transported from first mile to last mile of their journey using different modes of transportion (including, public and private).
A cross-platform smart phone application was developed to provide optimal meeting points for humans and/or robot teams. Some of the various use cases for finding optimal meeting points are: social rendezvous, ride-sharing, package delivery and logistic management. Recently, it has also found a useful application in multi-modal fleet management system where the passengers need to be transported from first mile to last mile of their journey using different modes of transportion (including, public and private).
 We designed floating sensors called drifters which can take measurements of water surface properties, log data
internally and communicate with other nearby surface agents.
Each drifter is equipped with a miniPC (Android MK-802), a GPS receiver (Adafruit)
and a 5V/2A battery pack. The miniPC is capable of storing on-board data (e.g. wind direction) and communicating with the searcher (Autonomous Surface Vehicle) via its in-built WiFi
antenna. The drifters are designed to be neutrally buoyant such that they float upright for
data collection, receive communication and GPS signals with minimal interference.
We designed floating sensors called drifters which can take measurements of water surface properties, log data
internally and communicate with other nearby surface agents.
Each drifter is equipped with a miniPC (Android MK-802), a GPS receiver (Adafruit)
and a 5V/2A battery pack. The miniPC is capable of storing on-board data (e.g. wind direction) and communicating with the searcher (Autonomous Surface Vehicle) via its in-built WiFi
antenna. The drifters are designed to be neutrally buoyant such that they float upright for
data collection, receive communication and GPS signals with minimal interference.
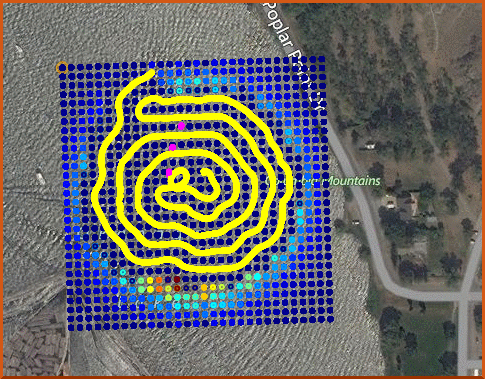 A real-time tracking tool for surface agents was required for our marine field trials, given
the large scale of the experiments involving drifting sensor targets, underwater and surface
vehicles. A web-interface was developed in collaboration with the members of Mobile Robotics
Lab at McGill University to visualize the real-time and simulated track paths of the agents
during the field experiments and simulated trials, respectively. The web-interface can cache
map tiles which allows us to use the interface even without an internet connection. It can
be easily integrated with any robotic platform using the ROS-bridge interface.
A real-time tracking tool for surface agents was required for our marine field trials, given
the large scale of the experiments involving drifting sensor targets, underwater and surface
vehicles. A web-interface was developed in collaboration with the members of Mobile Robotics
Lab at McGill University to visualize the real-time and simulated track paths of the agents
during the field experiments and simulated trials, respectively. The web-interface can cache
map tiles which allows us to use the interface even without an internet connection. It can
be easily integrated with any robotic platform using the ROS-bridge interface.