|
|
The Peppermill-carrier (PMC), a Novel Pick-and-place (P&P) Robot
The most frequent P&P operations involve three independent translations and one
rotation about an axis of fixed direction, usually vertical. The set of
displacements involved is termed Schönflies.
Current industrial P&P robots, intended for fast operations, carry four limbs,
which poses a challenge to the realization of half turns, mandatory in these
operations. A novel concept, comprising only two limbs, was disclosed by C.C.
Lee and P.C. Lee in a by-invitation-only symposium in December 2009. The
authors published their disclosure later in a book (Lou, Y. and Li, Z.,
Geometric Methods in Robotics and Mechanism Research. Theory and Applications,
Lambert Academic Publishing, Saarbrücken, Germany). This ingenious
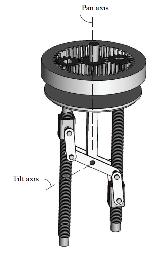
solution, however, relies on a two-degree-of-freedom (two-dof) drive to produce
the rotation of a collar about an axis and its translation in the directions of
the axis. Rsearch at the Robotic Mechanical Systems Laboratory (RMSLab), based
on theoretical kinematics Lie groups, led to a novel two-dof drive, termed the
C-drive.
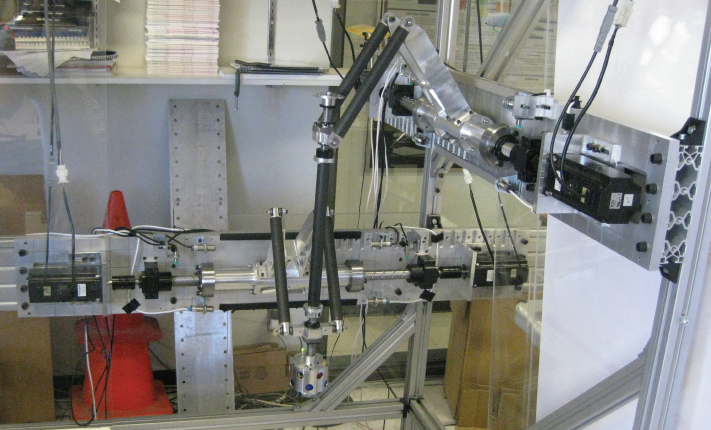
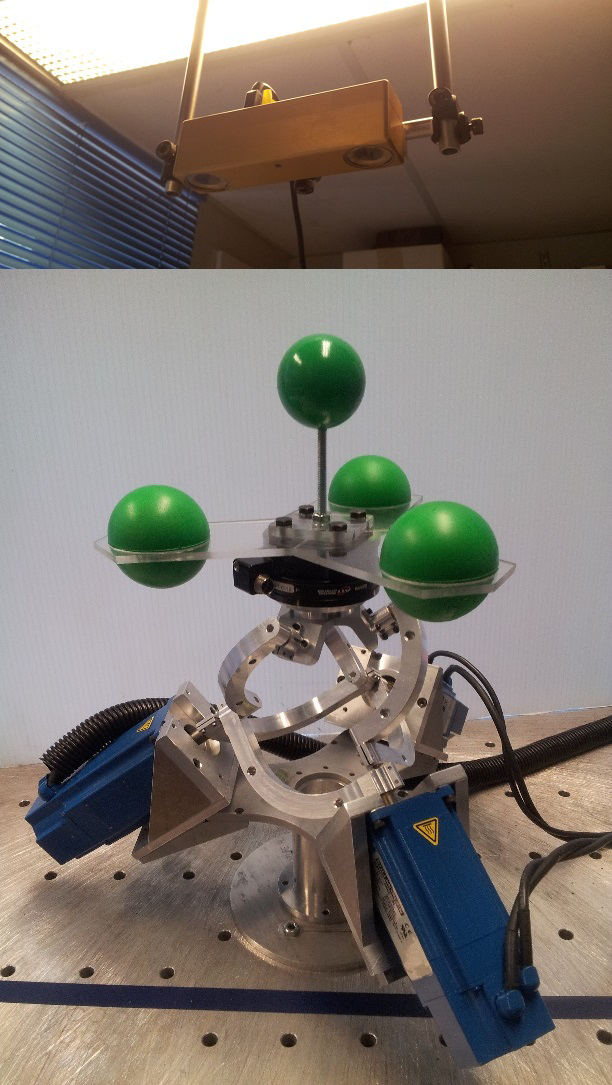
Lee and Lee's idea was realized at RMSLab using, two C-drives, in a
Schönflies-Motion Generator (SMG), dubbed the Peppermill-carrier, as the
gripper, in the form of a long rod, is actuated by means of the gesture of
waiters in Italian restaurants when serving pepper using a long peppermill.
For a pdf presentation of the system, see PMCdevelopment.pdf. For the videos of the system, please click PMCtestcycle.wmv, PMCdemo.wmv. (Prototype, videos, photo and slides were produced by Thomas
Friedlaender.)
For videos of the C-drive, click Translation.AVI, Rotation.AVI, Helix.AVI, RHHR3mtns.mp4.
For videos of the cable-driven C-drive, click C-drive alone, Mounted on the PMC (produced by Peyman Karimi Eskandary).
For a video of the strain-wave-gear-enhanced C-drive, click SWG-driven C-drive (produced by Peyman Karimi Eskandary).
For a video of the virtual screw, click Cable-driven Peppermill (produced by Peyman Karimi Eskandary).
For the MATLAB code of the Inverse Dynamics Analysis, click IKA Code, trajectory file (produced by Peyman Karimi Eskandary and Bruno Belzile).
|