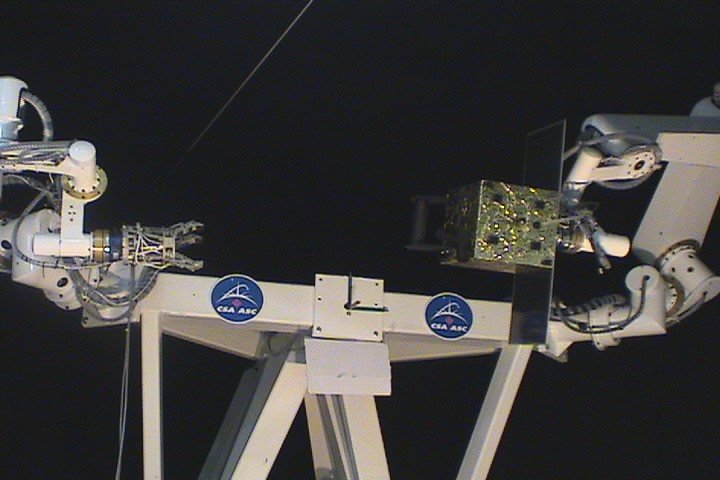
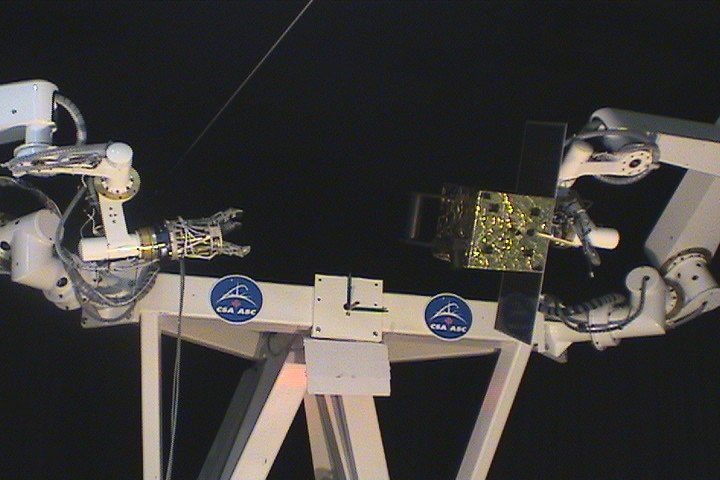
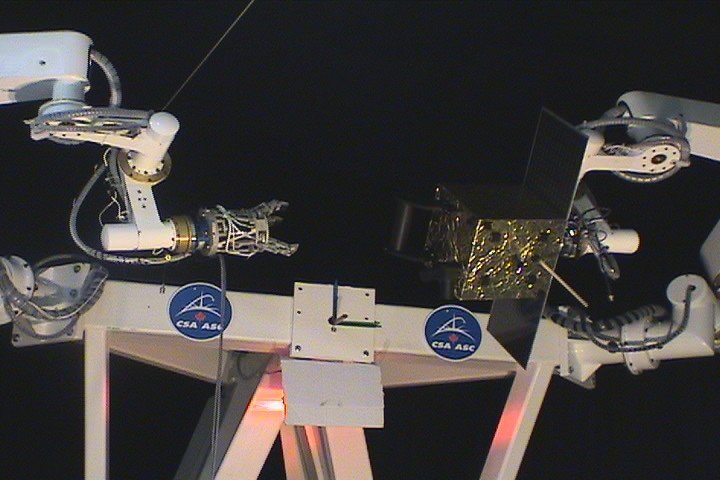
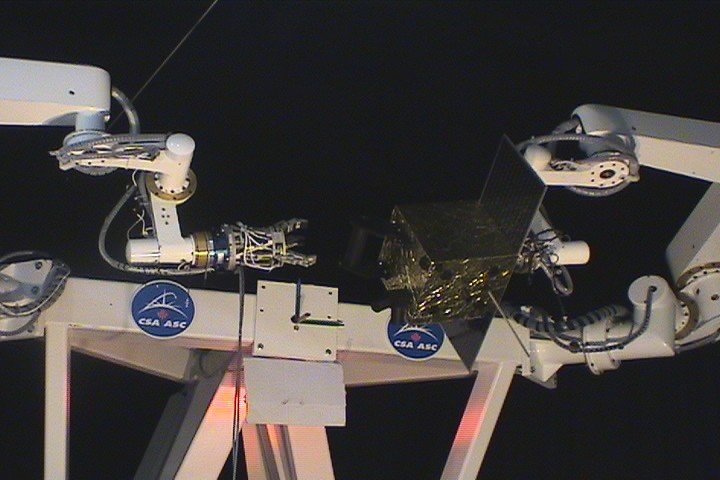
This work is based on laboratory experiments
that illustrate the autonomy and remote-operation aspects of the
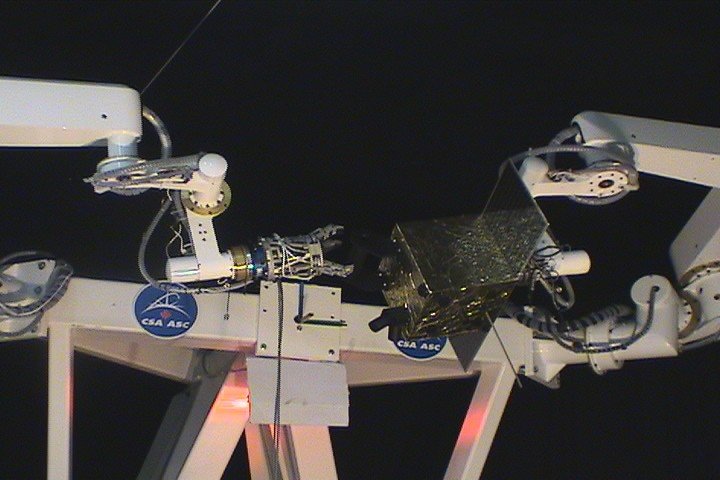
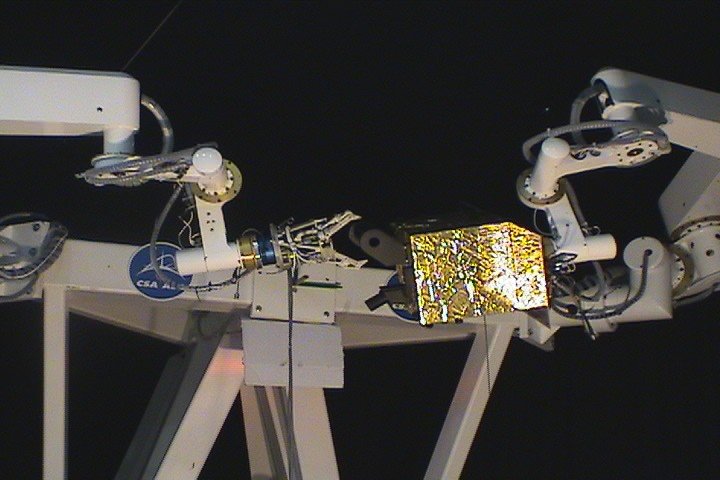
capture of a tumbling satellite. The
satellite-capture problem is representative of most on-orbit robotic
manipulation tasks where the environment is known and structured, but
it is dynamic since the satellite to be captured is in free
flight. Bandwidth limitations and communication dropouts dominate the
quality of the communication link. The satellite-servicing scenario
is implemented on a robotic test-bed in laboratory settings. The
communication aspects were validated in transatlantic tests.
Guy Rouleau, Ioannis Rekleitis Regent L'Archeveque, Eric
Martin, Kourosh Parsa, and Erick Dupuis
IEEE International Conference in Robotics and
Automation , May. 2006, Orlando, Florida, Page(s):3855 -
3860.