Blood Vessel Analysis
Maxime Descoteaux
McGill University
School of Computer Science &
Center for Intelligent Machines
3480 University Street
Montreal, QC H3A 2A7, Canada
mdesco@cim.mcgill.ca
Introduction
A three-dimensional (3D) representation of vasculature in the
brain is extremely important in image-guided neurosurgery,
pre-operation planning and clinical analysis. Typically, the data is
available in a set of two-dimensional slices covering the brain, where
a lot of information is present but noisy and hidden in between
slices. Experts have to select and color the desired regions of
slices before a program connects the colored components. This is
tedious, not precise and prone to human error. There is no reason why
one could not obtain improved results using intelligent shape models
and automatic reconstruction algorithms. In the course of my master's
research, I have mastered the theory of such model-based techniques
using invariant geometric flows for blood vessel segmentation. These
types of evolution equations are flexible and adaptable to new
constraints and external forces. The essential idea is to evolve a
surface in 3D so that it clings to the features of interest in the
image.
Problem
We are given a magnetic resonance sequence of images (MRI)
like the proton density shown below. Note
that blood vessels appear dark on bright structures in PD images
 Currently, most blood vessel segmentation approaches in the literature
work on specific MRA (Magnetic Resonance Angiogram) examples but are
not applicable on common MRI sequences like PD, T1 or T2.
The challenge is to detect and segment the 3D vasculature tree
present in that kind of standard MR image commonly used in all hospitals.
Currently, most blood vessel segmentation approaches in the literature
work on specific MRA (Magnetic Resonance Angiogram) examples but are
not applicable on common MRI sequences like PD, T1 or T2.
The challenge is to detect and segment the 3D vasculature tree
present in that kind of standard MR image commonly used in all hospitals.
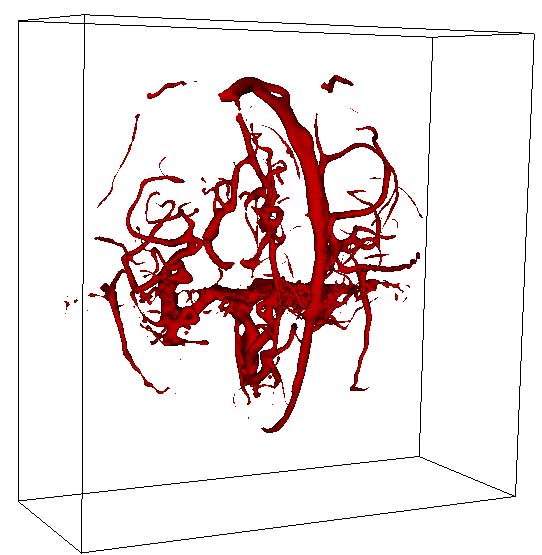
Approach
Here is the result of the flux maximizing flow segmentation on a MRA
image presented in [1].
A flow version of the augmentation that considers the estimated vessel geometry
of tube-like structures will be available soon.
-
- 1
-
A. Vasilevskiy and K. Siddiqi
Flux maximizing geometric flows.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 24:12, pp. 1-14, 2002.
- 2
-
A. Frangi, W. Niessen, K.L. Vincken, and M.A. Viergever
Multiscale vessel enhancement filtering.
Proc. MICCAI'98, pp.130-137, 1998.
- 3
-
K. Krissian, G. Malandain, N. Ayache
Model-based detection of tubular structures in 3D images.
Computer Vision and Image Understanding, 80:2,
pp. 130-171, Nov. 2000.
Maxime Descoteaux
Last update: November, 2003