Multi-sensor fusion for mobile robotics
Phil Habib, G. Dudek, Paul MacKenzie
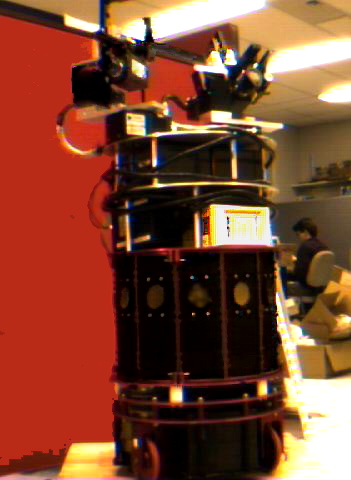
Non-linear optimization applied to data from several
robot-mounted sensors, inlcuding the QUADRIS sensor, shown here mounted on the robot.
Fused sensor data is being used to dynamically localize the
robot and construct representations of the environment.