Multi-Domain Monitoring of Marine Environments Using a Heterogeneous Robot Team
In order to enable evidence-based decision-making that affects our oceans and fragile marine ecosystems, such as coral reefs, we need to have automated and consistent environmental monitoring and inspection. Current best practices in monitoring the health of marine environments involve either passive, drifting sensors, such as the Argos network, or manual logging by human divers, typically expert marine biologists. The former method is cheap and appropriate for recording data at a macro scale, however it has little to no active actuation in order to visit desired locations. The latter requires a lot of human effort, is painstakingly slow, and is inherently limited in scope, as the diver can only visit a small number of underwater locations each day. Robotics has a fundamental role to play in overcoming these two inefficiencies and bridging the gap between these two types of data collection.
Manual data collection on the Great Barrier Reef (source)
 |
We describe a heterogeneous multi-robot system for assisting scientists in environmental monitoring
tasks, such as the inspection of marine ecosystems. This team of robots comprises a fixed-wing aerial vehicle, an autonomous airboat, and an agile legged underwater robot. These robots interact with off-site scientists and operate in a hierarchical structure to autonomously collect visual footage of interesting underwater regions, from multiple scales and mediums.
Our multirobot system and its interaction with expert scientists
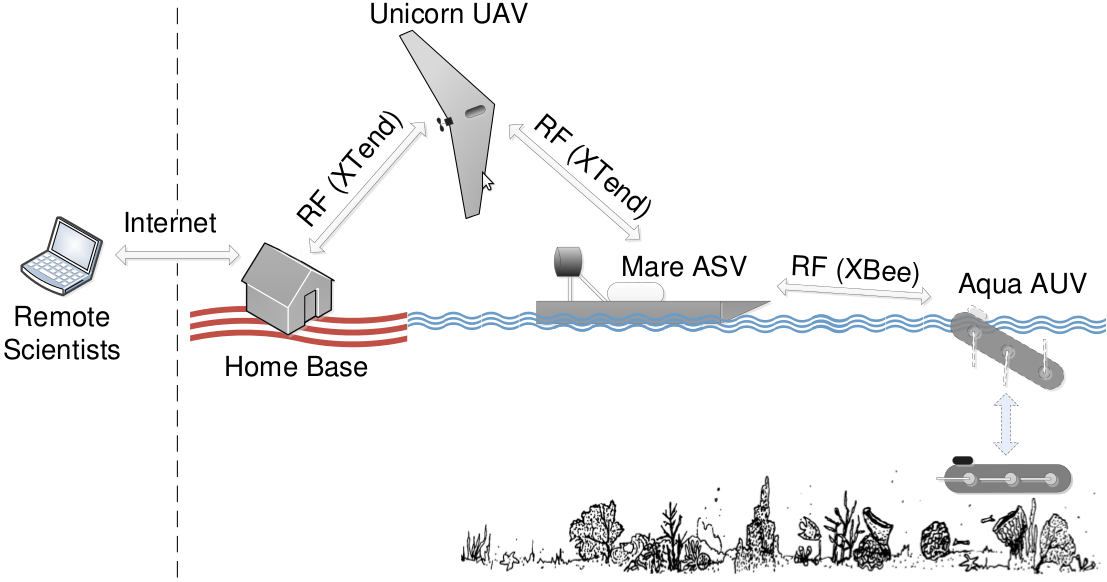 |
Our fixed-wing Unmanned Aerial Vehicle
 |
Our Aqua2 underwater vehicle
 |
We discuss organizational and scheduling complexities associated with multi-robot experiments in a field robotics setting. We also present results from our field trials, where we demonstrated the use of this heterogeneous robot team to achieve multi-domain monitoring of coral reefs, based on real-
time interaction with a remotely-located marine biologist.
{kind=link}