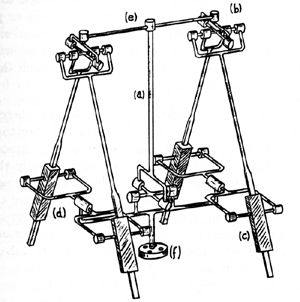
Hydraulic Robot Manipulator Shoulder
The Shoulder is a redundantly actuated mechanism: four pistons (prismatic joints), three degrees-of-freedom (orientation)