
The MicroTactus Tactile Enhancement System.
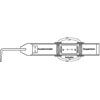
The MicroTactus is a family of instruments that we have designed to detect signals arising from the interaction of a tip with soft or hard objects and to magnify them for haptic and auditory reproduction; all in a hand-held single-unit system. To date the MicroTactus principle was tested in the form of an enhanced arthroscopic surgical probe used to detect small cuts in cartilage-like materials and other tissue anomalies. Related publications are available
98J,
92C ,
102C as well as a
project web page.
[ Back to top ]