|
CURRENT PROJECTS
|
|
BLIND SUPER-RESOLUTION USING A LEARNING-BASED APPROACH
Super-Resolution is the problem of obtaining a high-resolution version
of one or more low-resolution images. In most super-resolution
approaches, the camera degradation model must be known in advance. In
this project, the goal is to develop a blind super-resolution
algorithm using a supervised learning framework. (Researchers:
Isabelle Bégin and Frank P. Ferrie).
|
|
SPATIOTEMPORAL INDICATORS, MOTION SCALE SPACE,
AND PSYCHOPHYSICAL CORRELATES FOR CONTENT BASED VIDEO INDEXING AND RETRIEVAL
When searching through video archives for particular scenes of
interest, the amount of data is too overwhelming for a human operator
to be usefully parsed. The general field of content based video
indexing aims to make this task manageable by automatically
categorizing and indexing video content. An algorithm to detect and
categorize scenes using psychophysically correlated motion metrics
would enhance the state of the art for this field. (Researchers:
Prasun Lala and Frank P. Ferrie).
|
|
|
PHOTO HULL REGULARIZED STEREO
Generated by a space carving algorithm, the photo hull can at best
serve as a rough model to the scene. Using photo hull as a
regularizer, a regularization-based stereo method is investigated. A
refined depth map is expected because photo hull can help the
stereo algorithm by reducing the search space of the algorithm as
well as to solve the occlusion problem inherent in stereo. (Researchers: Shufei Fan and Frank P. Ferrie).
|
|
|
SENSOR NETWORKS
We imagine the following situation. Given a set of visual sensors
(cameras) with minimal knowledge of their operating parameters, we place these
cameras in an open complex environment. We would like the cameras to
collaborate autonomously, i.e. communicate and exchange information, in order
to derive a fine detailed 3D representation (a.k.a. visual model) of the
complex environment under consideration. (Researchers: Karim Abou-Moustafa and Frank P. Ferrie).
|
|
|
INVESTIGATING THE USE OF PROGRAMMABLE GRAPHICS
CARD TO ACCELERATE COMPUTER VISION ALGORITHMS
More details to come.
(Researchers: Prakash Patel
and Frank P. Ferrie).
|
|
|
VIRTUAL REALITY, OPTIMIZATION OF 3D SCENE DATA
New project! More details to come. (Researchers: John Harrison and Frank P. Ferrie).
|

|
GEOIDE
Intelligent data fusion for aircraft navigation and disaster
management. (Researchers:
Isabelle Bégin, Prasun Lala and Frank P. Ferrie).
|

|
CORIMEDIA
CoRIMedia is an academic research consortium on digital imaging,
video, audio and multimedia processing.
|
|
|
COMBINING DATA FROM DISTRIBUTED RANGE SENSORS (DRMS)
[More details]
|
|
PAST PROJECTS
|
|
ENHANCED AND SYNTHETIC VISION SYSTEM
The Enhanced and Synthetic Vision System (ESVS) is a Canadian
Forces Search And Rescue (CF SAR) Technology Demonstrator
project to help SAR helicopter crews
see in poor visibility conditions.
[More details]
|
|
MONOCULAR CAMERA CALIBRATION
The accurate calibration of monocular cameras is crucial for many
precision vision systems. Accordingly, many techniques have been
introduced to solve this problem, each having its own set of
limitations/requirements. The main intent of our work was to
provide practical guidelines for the implementation and assessment
of 14 state-of-the-art camera calibration methods found in the
technical literature.
|
|
ENTROPY-BASED GAZE PLANNING
In this work, we introduce the notion of entropy maps,
and show how they can be used to guide an active
observer along an optimal trajectory, by which the
identity and pose of objects in the world can be
inferred with confidence, while minimizing the amount
of data that must be gathered.
[More details]
|
|
INTERACTIVE VISUAL DIALOG
We have introduced a paradigm called the Interactive
Visual Dialog (IVD) as a means of facilitating a
system's ability to recognize objects presented to it
by a human.
[More details]
|
|
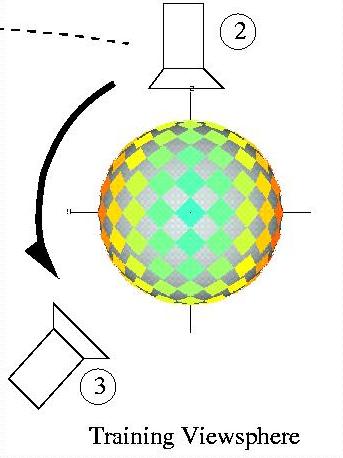
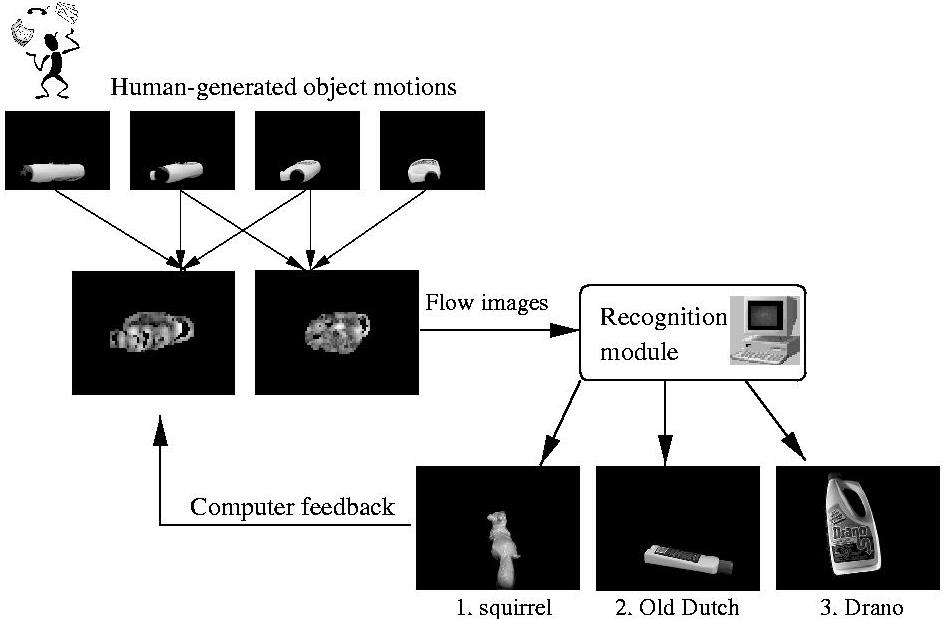
RECOGNIZING OBJECTS FROM CURVILINEAR
MOTION
The premise of this work is twofold: i) that an
object can be recognized on the basis of the optical
flow it induces on a stationary observer, and ii) that
a basis for recognition can be built on the appearance
of flow corresponding to local curvilinear motion.
[More details]
|
|
RANGE DATA
The APL was one of the
first laboratories to own a laser range finder. A
laser range finder is a non-contact
device that can measure the shape of a surface in 3D.
In collaboration with the NRC (National Research
Center), a sophisticated
synchronized laser scanner, with precision of up to
0.1 mm, was developed. Over the
years, the technology has become more accessible and
the APL has developed its own
custom design low-cost range
finder.
[More details]
|
|
MODEL BASED RECOGNITION
Given that the geometric models can be
extracted automatically from range data, it becomes
possible to recognize the parts of
an object. As shown in the right image, the problem
consists of matching a part of a scanned object with
a set of parts already stored in a database. The
belief level of this match is returned and can be
used to perform formal object identification.
|
|
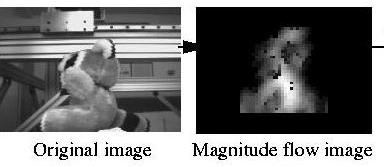
MONOCULAR VIDEO FLOW
More recently, the Artificial Perception
Laboratory has become interested in the computation
of video flow resulting of the
motion of an object on front of a video camera. This
ongoing research has gone
from traditional pixel to pixel image comparison to
more sophisticated frequency
space analysis methods.
[More details]
|
|
IMAGE INDEXING
The quick and accurate indexing of image
databases has become an interesting research topic as the access to large
databases becomes easier. Current indexing
techniques use commonly the appearance
of the object to match them into a databse. These
techniques can easily be fooled by
change in illumination. We study the limits of these fast indexing techniques
and how they can be improved.
|

|
FUSION OF SYNTHETIC AND INFRARED IMAGERY
This research presents the concept of an
Enhanced and Synthetic Vision System (ESVS)
that could help aircraft pilots see in low
visibility conditions. The basic idea is that
synthetic and infrared imagery would be fused
to maximize image content.
|
|
RESEARCH CONTRACTS
|
|
REVERSE ENGINEERING / OBJECT
INSPECTION
In many situations, a CAD model of an existing
object is required for manufactoring or in order
to perform design modifications to an object. In
this example, a prototype of a virtual reality
helmet was digitized for CAE Electronics Ltd.
The top image shows a grid representration of
the final model. On the bottom, an artificially
shaded surface renders the same surface.
|
|
SURFACE INTERPOLATION
A range image is composed of a large number of discrete 3D
points. They are in general sufficient to represent completely the
object. However, the surface between the points is undefined and has
to be interpolated in order to reproduce it with most prototyping
techniques. The NURBS (Non-Uniform Rational B-Spline) representation
are commonly used to perform this interpolation. It has the double
advantage of interpolating the data and reducing the data
substantially. The top figure shows a raw range image of an Indian
mask. The bottom figure shows the same information with a coarse NURBS
grid. This work was done in collaboration with Hymarc Ltd.
|
|
COMPUTER-AIDED SHOE DESIGN
Many people with abnormal feet require custom design shoes. For the
most part, this involves a tedious process of precise measurements and
the intervention of an experienced shoemaker. In this feasibility
study, an attempt to automate the whole process was done. The most
important design parameters can be changed for the customer and
visualized immediatly. The top figure shows the heel height selection
and the bottom figure shows the toebox shaping. The study was done in
collaboration with Telemars Recherche et Developpement Inc.
|

|
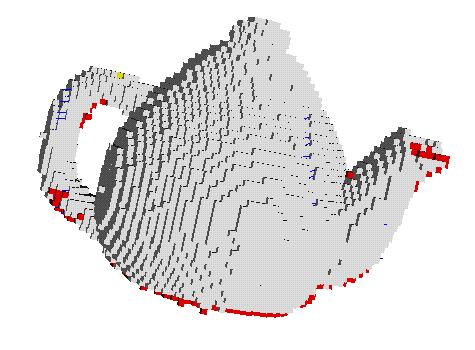
OBJECT DIGITIZATION
With current non-contact scanner technology the dense digitization of
complex objects can be done relatively quickly and to a high level of
precision (25 mm). The process is in general totally left to the
expert hands of an operator and the assessment of the overall quality
of the surface coverage is mostly subjective. Using the design
developed at the APL indicates that any holes on the surface of an
object (red cubes on the top figure) can be detected reliably and can
provide a completion criterion to the digitization process. The bottom
figure shows the scanner path followed to perform full surface
coverage. This work was done for Hymarc Ltd.
|
|
LOCALIZATION OF HIDDEN OBJECT
PARTS
In hostile environments, such as in space or in nuclear plants, human
intervention must kept as low as possible. Computer vision and robot
teleoperation must be tightly coordinated in order to perform the
complex tasks efficiently. The number of vision sensors is limited and
some objects will inevitably be hidden or occluded. Any action on
these objects requires that their location be computed precisely from
their relative position to the visible objects. The left figure shows
a test object where three components where used to deduce the location
of two targets in the right image. This work was done for
Hymarc Ltd.
|
|
BIOMEDICAL APPLICATION
The Artificial Perception Laboratory has done many collaborations with
other departments inside McGill University
and hospitals to acquire and process range data required for various statistical
analysis. The left image shows a collaboration to a project where the curvature
of the bones of the knee was modelled and then compared to real data in order
to produce artifical implants. The right image shows a similar project where
the surface of 229 vertebraes was scanned to evaluate the average dimensions
for various age groups.
|
|
CIVIL ENGINEERING COLLABORATION
In collaboration with the McGill Civil Engineering
Department, the surface of many large granite rocks
(3 feet diameter) was scanned to measure the effect
of high pressure water infiltration in rock
fractures. The surface of the rock was scanned right
after the rupture (top picture) and compared with a
scan of the same rock after putting the two parts
back together and applying high force constrain and
water pressure in the fracture. The bottom image
shows the color-coded surface difference of the
surface "before" and "after".
|
